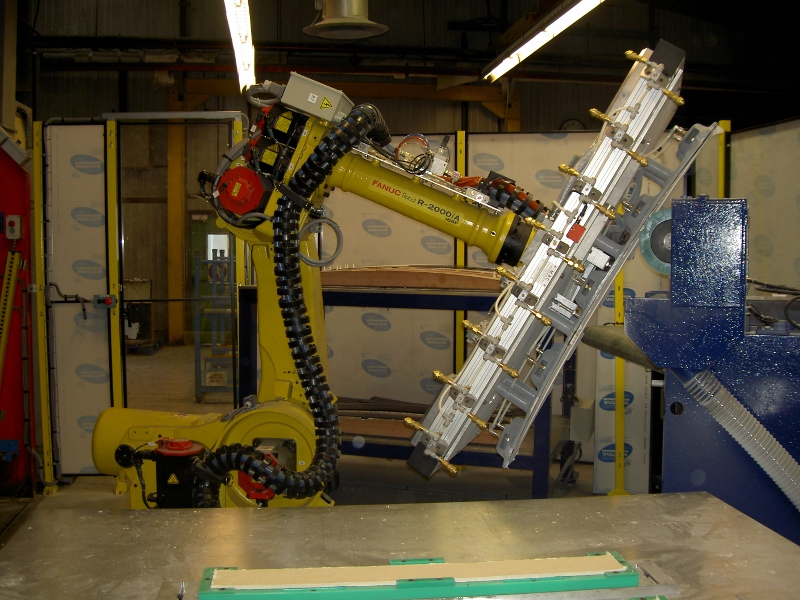
Pour la société SOCOPRESSES, j’ai participé au développement d’une machine permettant d’assembler un boîtier électronique pour la société WILO.
5 robots tous équipé d’une caméra (keyence) participaient à l’assemblage :
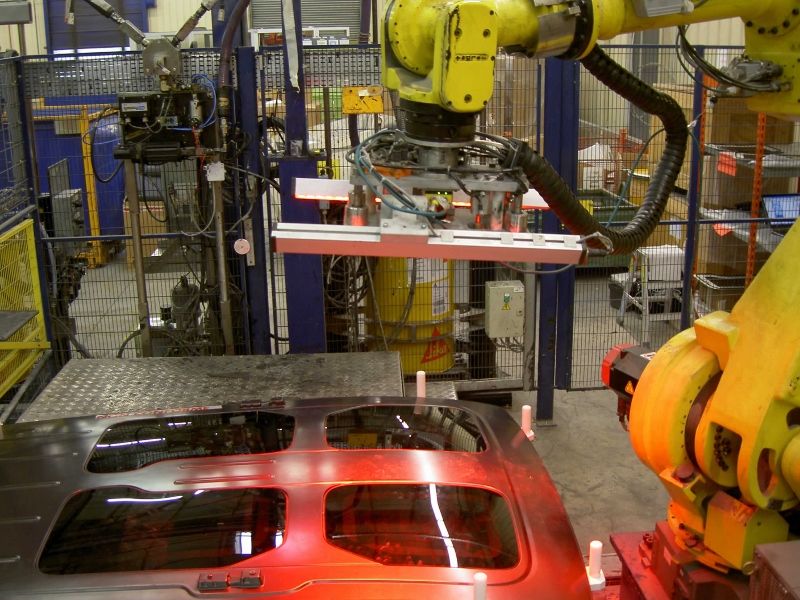
- Le 1er est charger de vérifier les boitiers et de les placer sur la ligne d’assemblage
- Le 2eme prend une lame de masse sur un thermoformé pour la positionner sur le poste d’assemblage.
- Le 3ème vérifie le bon type de carte électronique avant de charger la ligne.
- Le 4ème est chargé des couvercles
- Le 5ème charge les boitiers finis dans les bacs, empile ces derniers en y plaçant avant un intercalaire…
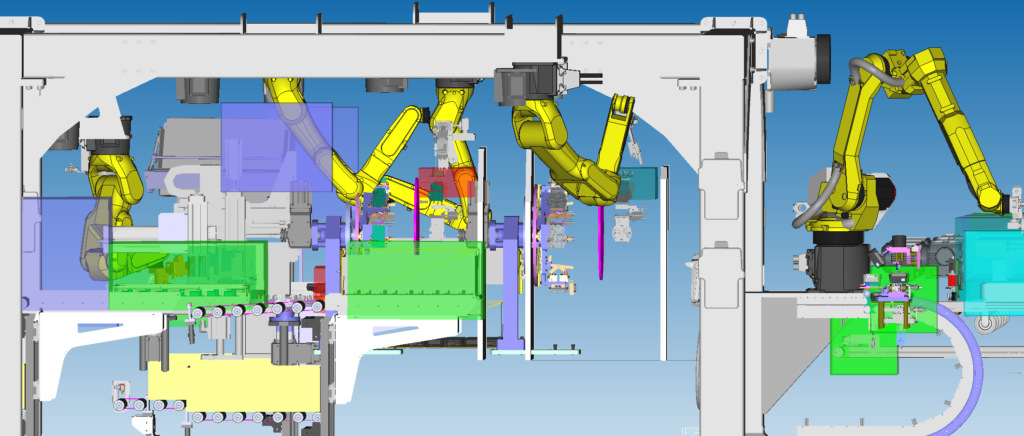
La production est de 700 boitiers heures avec une grande précision d’assemblage. La partie robotique n’est pas la partie la plus complexe de cette machine…